
Winning in the self-driving space requires moving quickly and decisively on foundational technical investments in hardware, software, and development tools. Such investments can be tough to make, as they often come at the expense of more visible near-term progress. These investments also require tremendous experience and conviction: experience to know where to place these bets, and conviction to stay the course until their returns are realized.
We’ve just realized a rather significant return on some early investments in the rapid development, build, commissioning, and commercial deployment of our next-generation self-driving trucks. Powered by the Aurora Driver, these trucks are designed to operate safely on highways, where prevailing speeds impose exacting requirements on the range and resolution of the sensors. They’re also designed to operate safely in industrial and urban spaces, where interacting with actors at close ranges require broad sensory fields of view and more complex driving behaviors.
This next generation of our vehicles takes advantage of the investments we’ve made in:
-
long-range, next-generation lidar
-
a presciently-designed, vehicle-agnostic Aurora Driver hardware kit
-
our industry-leading Virtual Test Suite
Even through the limitations of the pandemic, we’ve been able to leverage these and other tools to bring a next-generation platform to the road with industry-leading speed.
Here’s a closer look at a few of the key investments we put into motion years ago that allowed us to design, build, and launch this platform safely in just twelve weeks.
FirstLight Lidar to unlock high-speed driving

Our industry-leading sensor suite.
Close-up of FirstLight Lidar.
Safe operation of a truck at highway speeds requires seeing several hundred meters of the road ahead with multiple sensors. Traditional lidar can’t see that far, and cameras — no matter how narrow their field of view — won’t cut it. Until we unlocked it, neither we, nor any other company in the self-driving space, could reliably see this far.
So we focused our early development efforts on two things: 1) build a robust, broadly performant basis for our self-driving system in complex urban settings where we learned a lot very quickly, and 2) find a way to unlock safe, high-speed operation of trucks.
We began on the first in 2017. In 2019, we solved the second by investing in cutting-edge FMCW lidar technology and the most experienced FMCW lidar team on the planet. In the year that followed, we deeply integrated our engineering teams, leading to the development and launch of FirstLight Lidar—the current generation of which detects objects 400 meters away. When paired with cameras and radar, the resulting sensor suite is unmatched in the self-driving world, and essential to the safe, rapid deployment of a high-speed self-driving product.
Versatile hardware and software for broad scalability
The prevailing speeds and environmental complexities present in urban, suburban, and rural/highway driving make for a fairly diverse set of hardware needs. Self-driving hardware systems designed for low-speed urban environments will typically lack the long-range, multi-modal sensing required for high-speed highway driving. Similarly, self-driving systems designed for high-speed highway driving are often unable to accommodate more complex urban or suburban settings. Add to these the fact that different vehicles can impose different sensor perspectives, different control interfaces, and different dynamic responses, and the strong temptation for most self-driving development companies becomes to focus on just one use case and one vehicle.
This works well if your goal is early wins and perceived momentum. But if your goal is to ultimately deliver a broadly-scalable product, you’re better served by focusing first on foundational investments that allow the self-driving system to adapt to multiple vehicles and operating environments.
In the case of our next-generation truck, we leveraged our vehicle-agnostic hardware and the detailed vehicle requirements we first created in 2017. As we developed the Aurora Driver during the subsequent four years and eight different vehicle platforms, we refined these requirements in collaboration with several manufacturing partners. In 2018, for instance, we built our first Class 8 truck in close partnership with its manufacturer. This design and these requirements reflect the tremendous depth of knowledge we’ve gained through the years. As a result, our truck manufacturing partners trust our expertise, and lend their own, leading to very efficient and effective integration. We expect to use this to support multiple truck manufacturers in the creation of driverless-capable trucks.
A Virtual Testing Suite to accelerate development
As we’ve said since our early days, a strong virtual testing program is a marker of a mature self-driving effort, which is why we’ve invested so heavily in our Virtual Testing Suite. As the pandemic delayed manufacturing timelines and made it difficult to work physically on the newly-designed truck platform, these tools became even more important. The traditional approach to bringing up a new platform typically requires a physical vehicle to integrate hardware, calibrate sensors, and collect training data for software. Despite lacking that physical access, we leveraged our suite of truck-related tools originally developed during our first truck program in 2018 to quickly design and develop the truck virtually, shaving several months off the build.
Our world-class perception simulation team used existing tools to create realistic sensor simulations, like the one below, to adapt our perception models to this new truck before we’d ever touched it physically. These simulations, along with the thousands of new truck-specific tests generated each week, allow us to quickly test both common and rare situations that the Aurora Driver may encounter on highways and in urban environments.
From the simulated camera image (above) you can see a close-up of the corresponding lidar points (below) that outline the other vehicles in front of our truck. This illustrates how our detailed and accurate virtual worlds create realistic outputs across all of the Aurora Driver’s sensor modalities.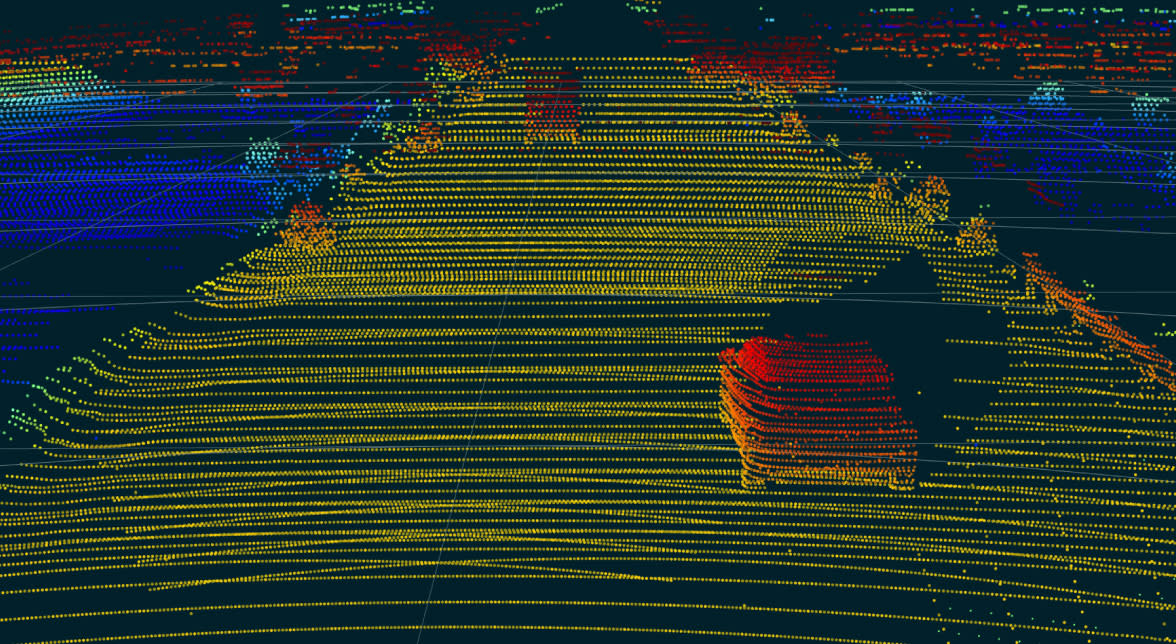
Safe and rapid development in the Aurora Test Site Network
When it came time to begin operation of our next-generation trucks, our expansive test site network allowed us to quickly perform final bring up and to allow for safe deployment to public roads.
Additive progress through foundational investments
Whether a vehicle is moving people or goods, an investment in foundational elements like world-class hardware, virtual development tools, or autonomy software can’t be sidestepped.
This is what we mean when we say progress is additive: our early focus on the complexities of urban street driving accelerates our ability to handle the hardest aspects of trucking.
Over the next few months, we will move with the same dutiful urgency to our next milestones around our testing in Texas and our commercialization plans. Stay tuned!
{kind=link}